大模型后训练的动力学 阅读笔记
本文是 ICLR 2025 Outstanding Paper 《Learning Dynamics of LLM Finetuning》的阅读笔记和评介,以一种简略的方式介绍一部分该文精华内容。有趣的是,这样一个关心模型训练本质的研究,为之前观察到的很多表面现象给出了更深刻的解释,包括重复、幻觉、离线策略DPO训练中所有响应的信心衰减等,未尝不是一种无心插柳柳成荫。
1. 问题定义
如标题所言,该文专注于大模型后训练中的动力学问题。尽管“动力学”很精准地表达了该文的中心,但对于未接触过系统研究的读者则可以表述得更直白:模型后训练无非就是用额外的数据进一步调节模型,那这些数据的使用究竟给模型带来了什么变化?该问题无疑会让人产生更多联想:后训练过程中发生了什么,有什么影响,如何观测这些结果,如何预期在真实使用场景中它会有什么表现?这些问题背后暗示着对理解大模型背后机制的解释性理论的憧憬,且该解释最好是精确的,而非半桶水似的泛泛而谈、充满了修辞手法却停在抽象层面。
这么复杂的问题该如何解答呢?作者首先将“模型训练动力学”问题具体表达为:模型参数 \(\theta\) 的 变化如何影响模型输出 \(f_\theta\)的变化,即 \(\Delta\theta\) 和 \(\Delta f_\theta\) 的关系。假如用最普通的随机梯度下降方法,则该问题可以进一步转化为样本之间的联系:
\[\Delta \theta \triangleq \theta^{t+1} - \theta^t = -\eta \cdot \nabla \mathcal{L}\left(f_{\theta}(\mathbf{x}_u), \mathbf{y}_u\right); \quad \Delta f(\mathbf{x}_o) \triangleq f_{\theta^{t+1}}(\mathbf{x}_o) - f_{\theta^t}(\mathbf{x}_o)\]其中 \(x_u\) 是训练样本,\(x_o\) 是推理样本。
2. 形式拆解
到这里 \(\Delta\theta\) 和 \(\Delta f_\theta\) 虽然定义清楚了,但二者还没直接联系起来,还需要继续推导形式上的关系。
作者引入了常规的记号继续推导:给定输入 \(x\) ,输出是一组预测 \(y=\{y_1, \dots,y_L\}\in \mathcal{V}^L\),其中 \(\mathcal{V}\) 是词表大小,即目标域。模型首先计算 \(x\) 的 logits 即\(z=h_\theta(x) \in \mathbb{R}^{V\times L}\),再做 Softmax 运算求出 \(y=\{y_i\}^L\) 的概率,即\(\pi=\text{softmax}(z)\)。 可以通过衡量其对数似然 \(\log\pi_\theta(y\mid x)\) 来观测模型对输出的信心。上式变为:
\[\begin{aligned} \Delta f(\mathbf{x}_o) &\triangleq f_{\theta^{t+1}}(\mathbf{x}_o) - f_{\theta^t}(\mathbf{x}_o) \\ \Delta \log\pi^t(y\mid x) &\triangleq \log\pi_{\theta^{t+1}}(y\mid x) - \log\pi_{\theta^t}(y\mid x) \end{aligned}\]如果只考虑 \(L=1\),即只输出一个标签,问题就可以看成普通的分类。此时就可以继续将 \(\Delta f(\mathbf{x}_o)\) 分解成有物理意义的三个因子,用于解释 \(\Delta\theta\) 和\(\Delta f_\theta(\cdot)\) 的关系。即如下命题:
Proposition 1. Let \(\pi = \text{Softmax}(\mathbf{z})\) and \(\mathbf{z} = h_{\theta}(\mathbf{x})\). The one-step learning dynamics decompose as
\[\Delta \log \pi^t(\mathbf{y} \mid \mathbf{x}_o) = \underbrace{-\eta}_{V \times 1} \underbrace{\mathcal{A}^t(\mathbf{x}_o)}_{V \times V} \underbrace{\mathcal{K}^t(\mathbf{x}_o, \mathbf{x}_u)}_{V \times V} \underbrace{\mathcal{G}^t(\mathbf{x}_u, \mathbf{y}_u)}_{V \times 1} + \mathcal{O}(\eta^2 \|\nabla_{\theta} \mathbf{z}(\mathbf{x}_u)\|_{\text{op}}^2),\]where \(\mathcal{A}^t(\mathbf{x}_o)=\nabla_{\mathbf{z}} \log \pi_{\theta^t}(\mathbf{x}_o) = I - \mathbf{1} \pi_{\theta^t}^{\top}(\mathbf{x}_o)\), \(\mathcal{K}^t(\mathbf{x}_o, \mathbf{x}_u) = (\nabla_{\theta} \mathbf{z}(\mathbf{x}_o)|_{\theta^t})(\nabla_{\theta} \mathbf{z}(\mathbf{x}_u)|_{\theta^t})^{\top}\) is the empirical neural tangent kernel of the logit network \(\mathbf{z}\), and \(\mathcal{G}^t(\mathbf{x}_u, \mathbf{y}_u) = \nabla_{\mathbf{z}} \mathcal{L}(\mathbf{x}_u, \mathbf{y}_u)|_{\mathbf{z}^t}\).
这三个因子具有重要意义,其中后两个贯穿本文的分析过程:
- A只跟模型当前预测有关(t时刻),跟本文所关心的变化量无关
- K是一个经验的“神经正切核”,代表了两个样本在特定模型眼里的相似性(没有解释性)
- G和损失函数有关,为模型训练提供“能源”(借鉴动力学的比喻)
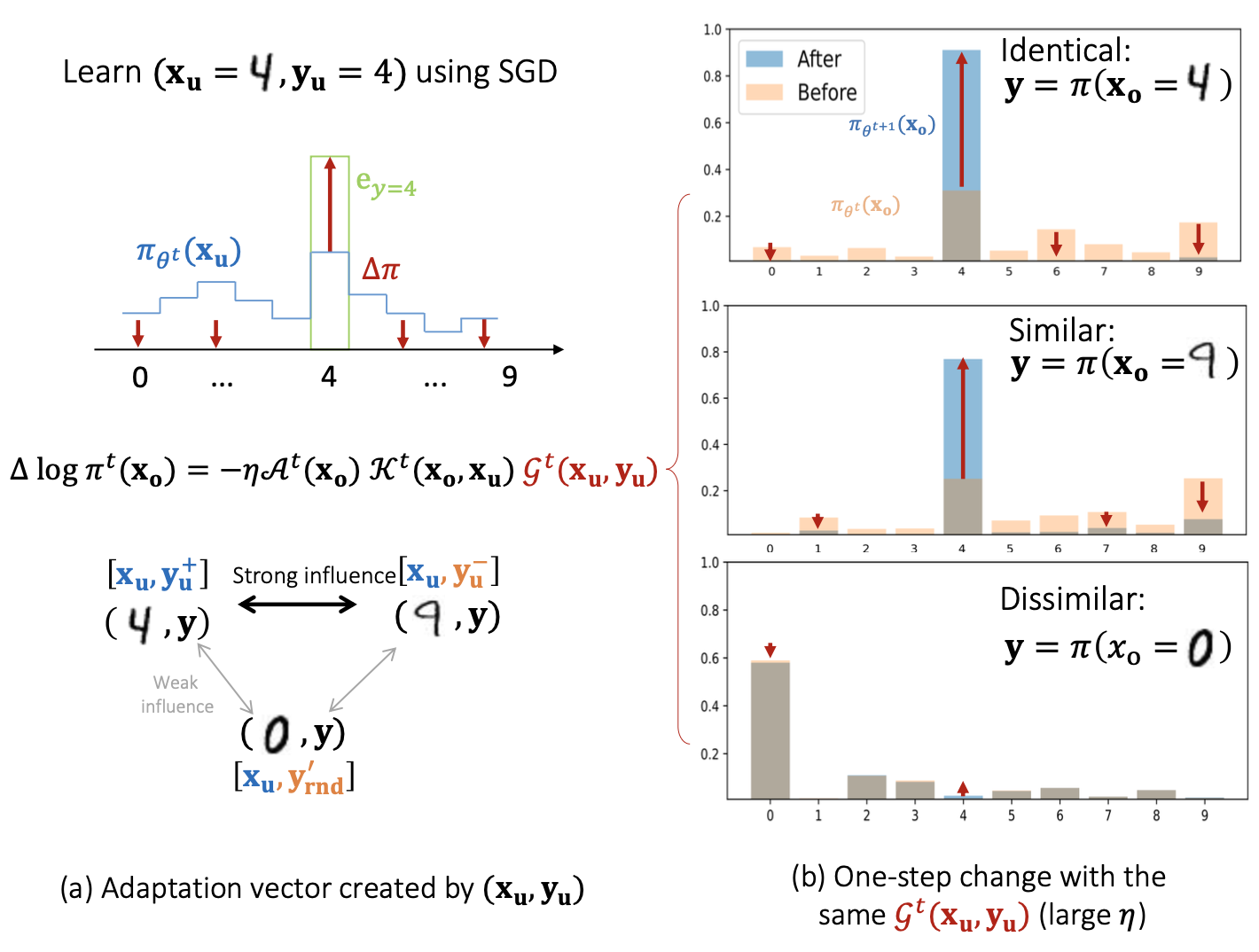
基于MNIST的解释
以经典的分类任务 MNIST 作为案例研究可以粗略对应上面两个因子的解释:
从单步动态可发现:
- 训练样本的预测概率被G项dominate
- 相似样本的概率也被拉大(即使预测错误)
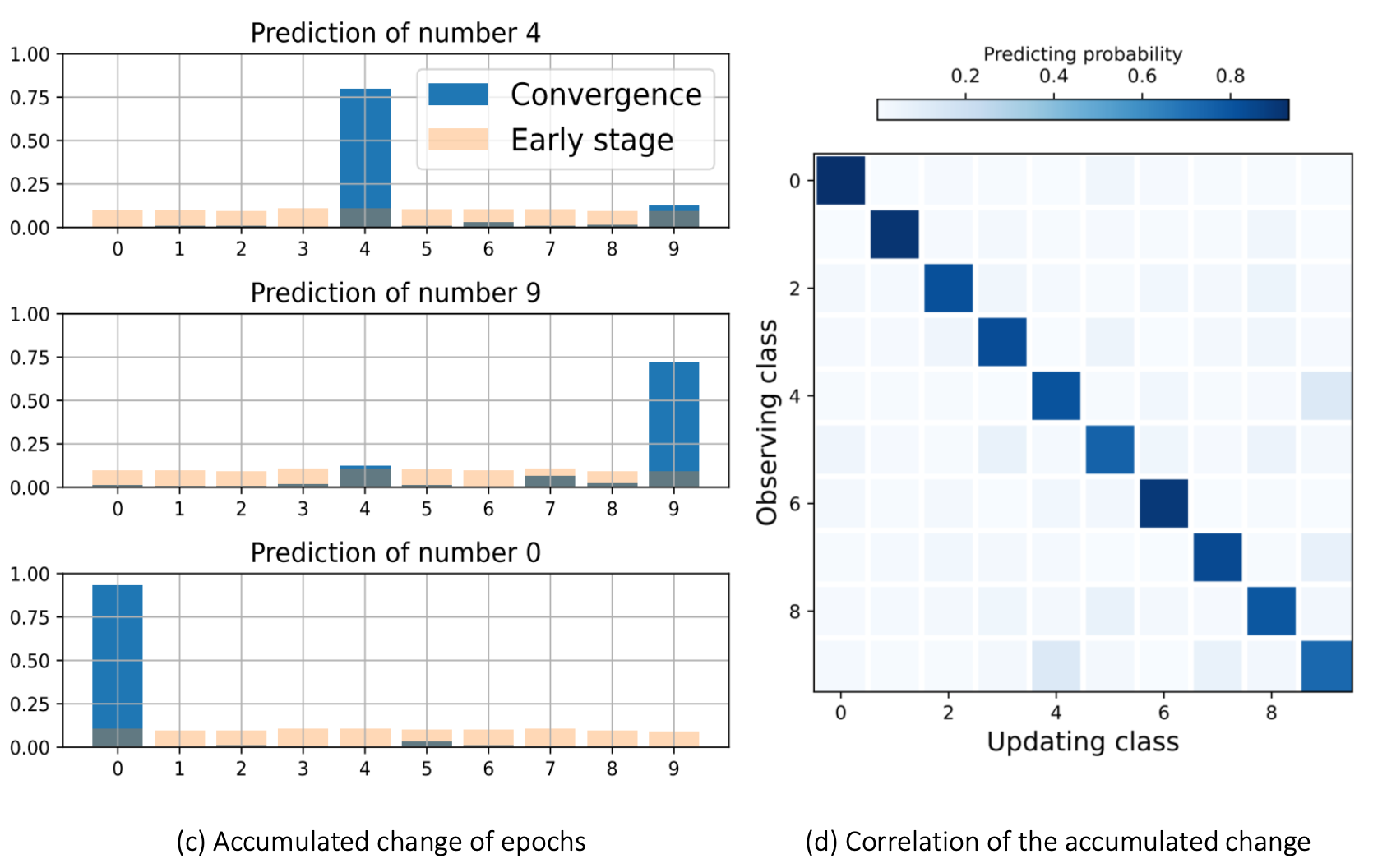
累计的观测也验证了该结论:
- 训练结束时4和9相互有更高信心,而不相似的0没有太大
- 把每个类别分别平均,可以观察到除了对角线之外的其他高亮
3. 大模型的分解
对于大模型,最大的区别在于输出的 y 是不定长的句子。但采取的方式非常简单,直接将前面的 y 扩张出一个长度维度叠起来,并拼接大模型的输入 x 和输出 y。
SFT
其损失为:
\[\mathcal{L}_{\text{SFT}} ( \mathbf{x} _u, \mathbf{y} _u^+) \triangleq - \sum _ {l=1} ^L \log \pi (y = y_l^+ \mid \mathbf{y} _ {<l} ^+, \mathbf{x} _u) = - \sum _ {l=1} ^L \mathbf{e} _ {y_l^+} \cdot \log \pi ( \mathbf{y} \mid \mathbf{x} _u, \mathbf{y} _ {<l} ^+)\]相应的各项分解于 MNIST 的例子很接近:
\[\left[ \Delta \log \pi^t(\mathbf{y} \mid \boldsymbol{\chi}_o) \right]_m = - \sum_{l=1}^L \eta [\mathcal{A}^t(\boldsymbol{\chi}_o)]_m [\mathcal{K}^t(\boldsymbol{\chi}_o, \boldsymbol{\chi}_u)]_l [\mathcal{G}^t(\boldsymbol{\chi}_u)]_l + \mathcal{O}(\eta^2),\]其中 \(\mathcal{G}_{\text{SFT}}^t(\boldsymbol{\chi}_u) = \pi_{\theta^t}(\mathbf{y} \mid \boldsymbol{\chi}_u) - \mathbf{y}_u\)。证明从略。这里唯一的区别是:在 MNIST 中 x 是样本,现在的 \(\chi\) 是 x 和 y,于是可以评估同一个 prompt 的两个输出的相互影响。
因此对SFT的预测和前面类似:正样本和它的相似样本都会被施加一个概率增大的力。
DPO
其损失为:
\[\mathcal{L}_{\text{DPO}}(\theta) = -\mathbb{E}_{(\mathbf{x}_u, \mathbf{y}_u^+, \mathbf{y}_u^-) \sim \mathcal{D}} \left[ \log \sigma \left( \beta \log \frac{\pi_{\theta^t}(\mathbf{y}_u^+ \mid \boldsymbol{\chi}_u^+)}{\pi_{\text{ref}}(\mathbf{y}_u^+ \mid \boldsymbol{\chi}_u^+)} - \beta \log \frac{\pi_{\theta^t}(\mathbf{y}_u^- \mid \boldsymbol{\chi}_u^-)}{\pi_{\text{ref}}(\mathbf{y}_u^- \mid \boldsymbol{\chi}_u^-)} \right) \right]\]各项分解为:
\[\begin{aligned} [\Delta \log \pi^t(\mathbf{y} \mid \boldsymbol{\chi}_o)]_m &= -\sum_{l=1}^L \eta [\mathcal{A}^t(\boldsymbol{\chi}_o)]_m \left( [\mathcal{K}^t(\boldsymbol{\chi}_o, \boldsymbol{\chi}_u^+)]_l [\mathcal{G}_{\text{DPO}+}^t]_l - [\mathcal{K}^t(\boldsymbol{\chi}_o, \boldsymbol{\chi}_u^-)]_l [\mathcal{G}_{\text{DPO}-}^t]_l \right) + \mathcal{O}(\eta^2) \\ \mathcal{G}_{\text{DPO}+}^t &= \beta(1 - a) \left( \pi_{\theta^t}(\mathbf{y} \mid \boldsymbol{\chi}_u^+) - \mathbf{y}_u^+ \right); \quad \quad \mathcal{G}_{\text{DPO}-}^t = \beta(1 - a) \left( \pi_{\theta^t}(\mathbf{y} \mid \boldsymbol{\chi}_u^-) - \mathbf{y}_u^- \right) \end{aligned}\]其中 a 是 sigmoid 的值,可理解为当前策略对正负样本的区分能力,当a比较小时,正负样本带来的能量就比较小。
beta 是个超参,控制参考模型的充当正则项的作用大小,当策略很差时,增大 beta 能加速靠近参考模型,而当策略较好,更大beta也会增大 a 从而弱化能量源的作用。这个分析直接从上式给出,与DPO原文关于参考模型的正则化作用相吻合。
此处没有讨论正负样本来源,因此它既可以是离线的,也可以是在线的。由于离线的正负样本可能是模型都不偏好的,此时会产生非预期的行为,而在线的算法改进可以缓解该问题。
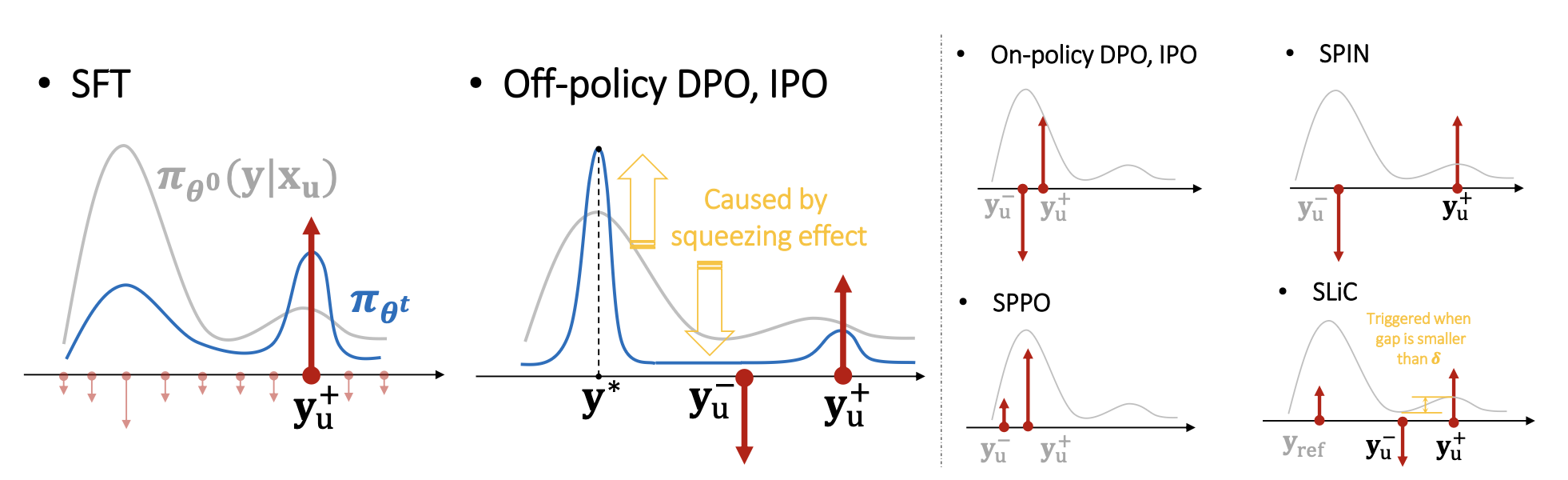
挤压效应
SFT 和 DPO 的关键区别在负样本的使用。正负样本在强化后概率都可能降低,那概率去哪了?作者预测了一个概率挤压问题(L=1情形):
- 负样本训练导致负样本概率降低
- 概率被主要分配到排除负样本之外最高的样本 y*
- 强者越强,弱者越弱
- 大模型往往只预测少量几个高概率输出,因而所有非峰值的 token 概率全部降低
- 负样本的概率越低,训练后唯一的极值 token 概率增加最多
但是,该问题由于有正负样本同时作用、自回归、NTK等多重影响,分析并没有那么容易。作者仅在逻辑回归模型上分析地证明了该现象,后续会通过实验验证。但另一方面,假如该现象确实存在,那么可以预测坏处。作者展示了 SFT 阶段越长、DPO带来的挤压作用越严重。
因此,由于挤压作用的负面影响,模型的概率最大输出会更大,极易在偏好训练后产生重复效应。
4. 实验证据
探测手段
模型:pythia-410M/1B/1.4B/2.8B 和 Qwen1.5-0.5B/1.8B 数据集:Anthropic-HH 和 UltraFeedback
构造探测集合,从训练集中选出500个样本:x、y+、y-,按照不同策略构造更多正负样本,分别实验。
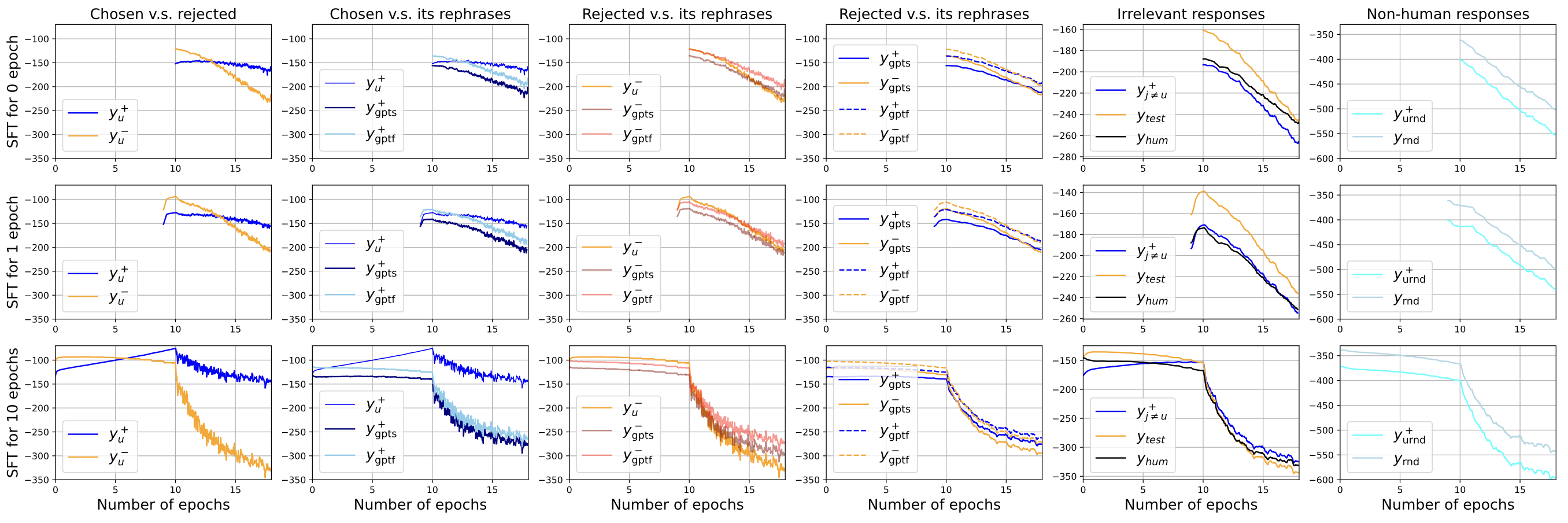
SFT
验证方法:每25步验证一次全集,bs=4时为每100个样本(全集约5k)
符合预期结论:
- 一开始猛增,由于NTK相似性+梯度能量共同作用,尽管这些样本没见过
- 随着模型增强,梯度作用降低,非正样本的概率逐步下降
- 随机答案由于相似性很低,一直在大幅下降
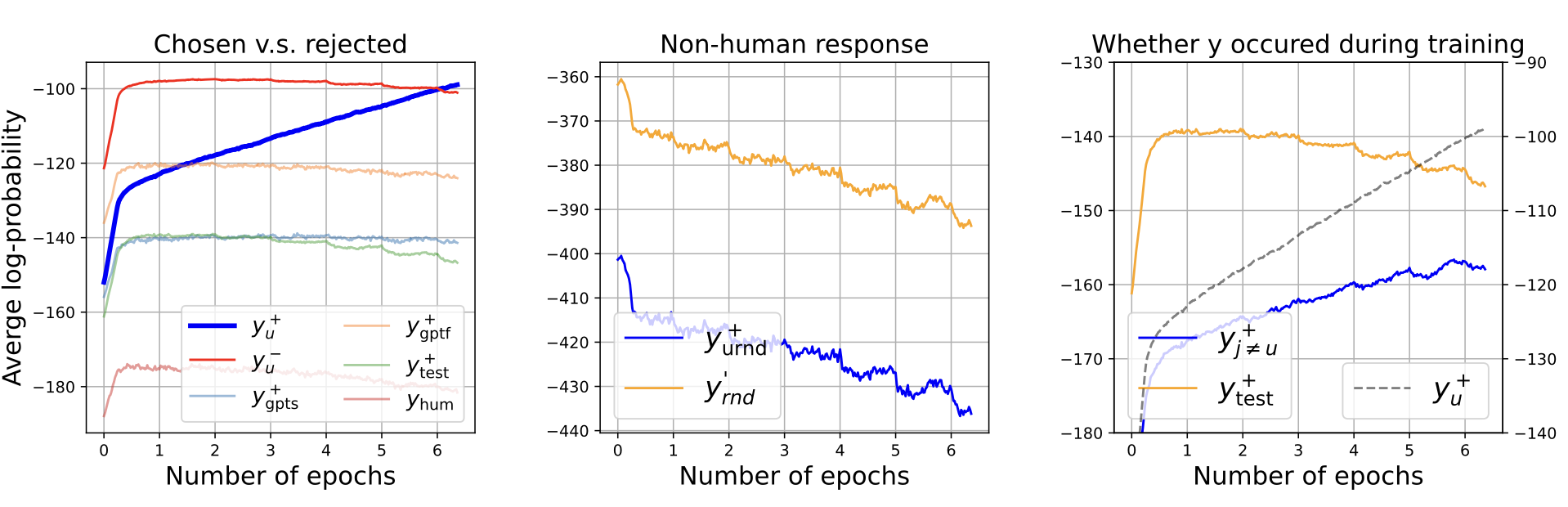
此外,随着训练持续,嫁接其他训练样本的输出也有增加趋势(当然,增加趋势远不如样本自己)。这解释了SFT幻觉的产生实质:模型逐渐挪用其他训练样本的答案来回答这个答案。
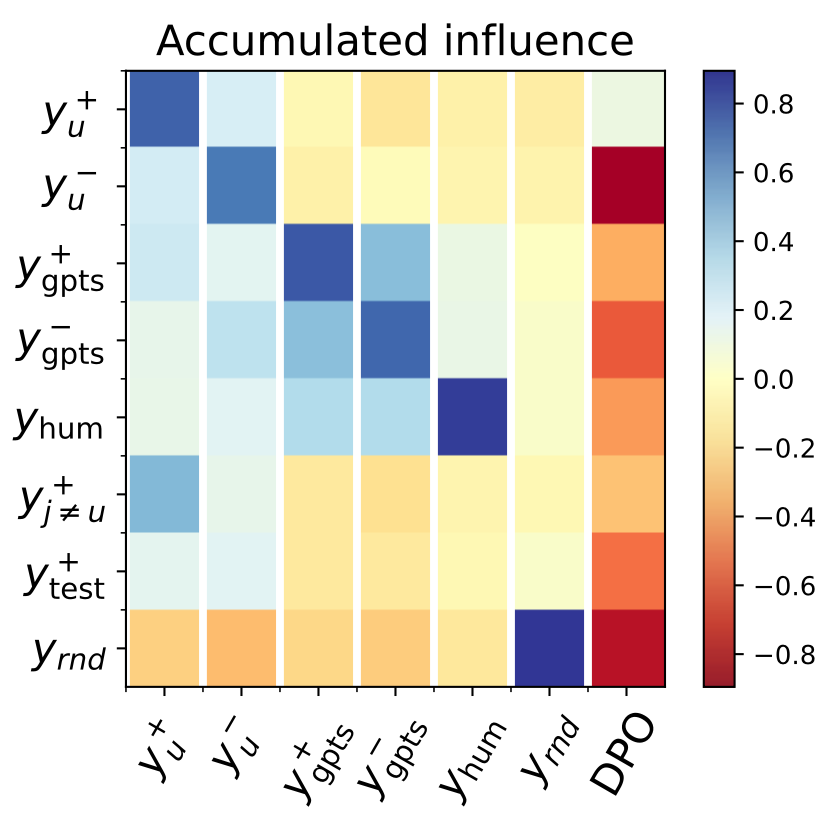
通过概率来估计相似度,横轴是更新样本,纵轴是观测样本。即给定 GPT 生成的样本进行训练,无论哪种GPT样本居然都有较高的概率,说明模型生成的数据可能存在暂时不能言明的指纹。(实际设置存疑)
DPO
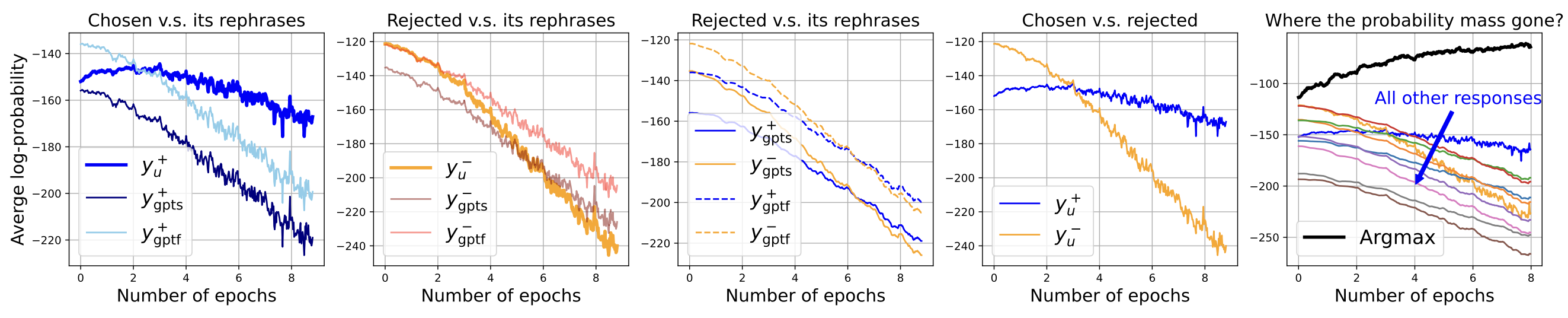
离线的DPO实验也符合预期:
- 正负样本概率都会逐渐下降(验证了NTK较大,but其实应该相反,检验NTK大小的区别)
- 但正例(及其复述)降得缓慢一些,因为正例有一个向上推力
- 模型概率最大的回复会强者恒强
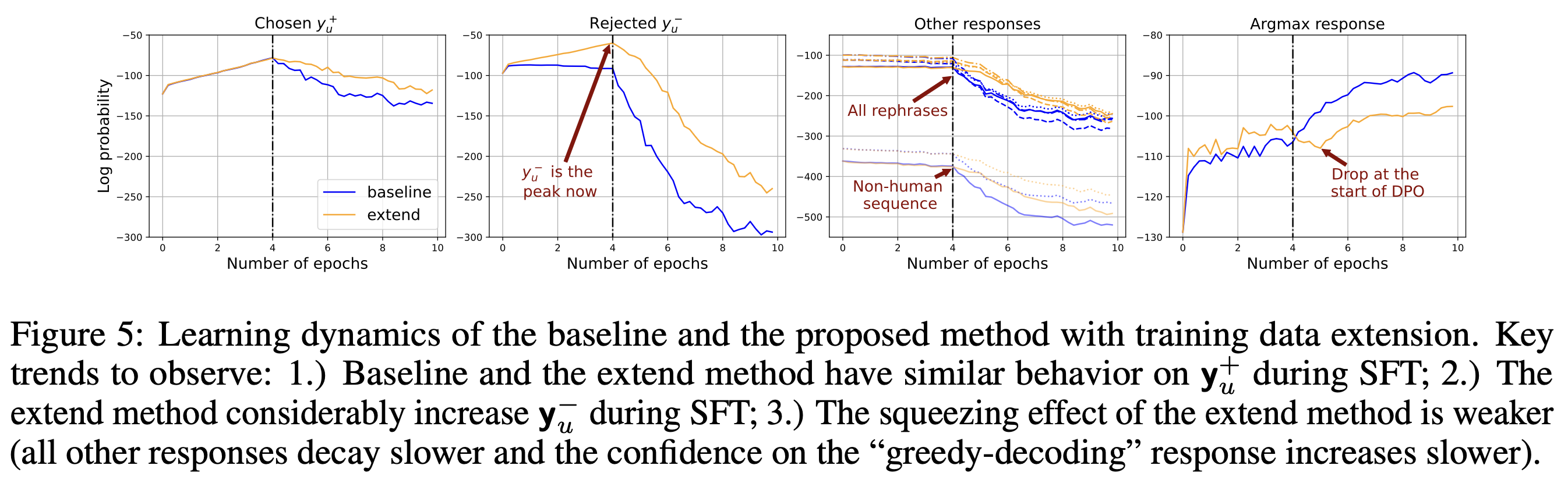
对于DPO,作者提出,首先将正负样本都做一遍 SFT,让负例也有一定的概率,然后再做DPO。实验确认:
- 可以减缓正例的概率降低的速度
- DPO概率最大的策略有少许下降,后续概率上升也不再极端
5. 结论
理论贡献:从动态的视角给了一种解释性框架(模型的“示波器”),统一地解释了模型后训练的很多算法(包括正文中没有展开的一众DPO扩展)
现象解释:从更根本的角度,一股脑地解释了偏好训练后的重复现象、SFT后的幻觉、DPO后输出的退化等多种现象。
应用价值:从动力学角度对样本的删减、多样性的评估、样本之间的相互作用等任务给出了可验证的路线。
附
命题1证明
可以将上述命题贴入不同AI看它们怎么证明的。
Proposition 1. Let \(\pi = \text{Softmax}(\mathbf{z})\) and \(\mathbf{z} = h_{\theta}(\mathbf{x})\). The one-step learning dynamics decompose as
\( \Delta \log \pi^t(\mathbf{y} \mid \mathbf{x}o) = \underbrace{-\eta}{V \times 1} \underbrace{\mathcal{A}^t(\mathbf{x}o)}{V \times V} \underbrace{\mathcal{K}^t(\mathbf{x}o, \mathbf{x}_u)}{V \times V} \underbrace{\mathcal{G}^t(\mathbf{x}u, \mathbf{y}_u)}{V \times 1} + \mathcal{O}(\eta^2 |\nabla_{\theta} \mathbf{z}(\mathbf{x}u)|{\text{op}}^2), \)
where \(\mathcal{A}^t(\mathbf{x}o) = \nabla{\mathbf{z}} \log \pi_{\theta^t}(\mathbf{x}o) = I - \mathbf{1} \pi{\theta^t}^{\top}(\mathbf{x}o)\), \(\mathcal{K}^t(\mathbf{x}_o, \mathbf{x}_u) = (\nabla{\theta} \mathbf{z}(\mathbf{x}o)|{\theta^t})(\nabla_{\theta} \mathbf{z}(\mathbf{x}u)|{\theta^t})^{\top}\) is the empirical neural tangent kernel of the logit network \(z\), and \(\mathcal{G}^t(\mathbf{x}u, \mathbf{y}_u) = \nabla{\mathbf{z}} \mathcal{L}(\mathbf{x}u, \mathbf{y}_u)|{\mathbf{z}^t}\).
ChatGPT o4-mini
下面给出一个基于一阶泰勒展开和链式法则的证明思路。
记号约定
- 令 \(z^t(x)=h_{\theta^t}(x)\),\ \(\pi^t(x)=\text{Softmax}\bigl(z^t(x)\bigr)\)。
- 在时刻 \(t\) 做一次梯度下降更新:
1. 参数更新诱导的 logit 变化
对 \(z(x)=h_\theta(x)\) 作一阶泰勒展开,
\[z^{t+1}(x) = h_{\theta^{t+1}}(x) \approx z^t(x) +\bigl(\nabla_\theta h_\theta(x)\bigr)\bigl|_{\theta^t}\;\bigl(\theta^{t+1}-\theta^t\bigr) +O\bigl(\|\theta^{t+1}-\theta^t\|^2\bigr).\]代入 \(\theta^{t+1}-\theta^t=-\eta\,\nabla_\theta\mathcal{L}_u\big|_{\theta^t}\) (其中简写 \(\mathcal{L}_u=\mathcal{L}(x_u,y_u)\) )得
\[z^{t+1}(x) \approx z^t(x) -\eta\,\bigl[\nabla_\theta h_\theta(x)\bigr]_{\theta^t}\; \bigl[\nabla_\theta\mathcal{L}_u\bigr]_{\theta^t} \;+\;O\bigl(\eta^2\,\|\nabla_\theta h_\theta(x_u)\|_{\mathrm{op}}^2\bigr).\]注意到
\[\nabla_\theta\mathcal{L}_u =\bigl(\nabla_z\mathcal{L}_u\bigr)^\top\; \nabla_\theta h_\theta(x_u) \quad\Longrightarrow\quad \nabla_\theta h_\theta(x)\,\nabla_\theta\mathcal{L}_u =\bigl[\nabla_\theta h_\theta(x)\bigr] \bigl[\nabla_\theta h_\theta(x_u)\bigr]^\top\, \nabla_z\mathcal{L}_u.\]定义
\[\mathcal{K}^t(x,x') =\bigl[\nabla_\theta h_\theta(x)\bigr]_{\theta^t} \;\bigl[\nabla_\theta h_\theta(x')\bigr]_{\theta^t}^{\!\top}, \qquad G^t_u=\nabla_z\mathcal{L}\bigl(x_u,y_u\bigl)\big|_{z^t},\]于是对任意 \(x\) 都有
\[z^{t+1}(x)-z^t(x) \approx -\eta\,\mathcal{K}^t\bigl(x,x_u\bigr)\;G^t_u \;+\;O\bigl(\eta^2\,\|\nabla_\theta h_\theta(x_u)\|_{\mathrm{op}}^2\bigr).\]2. 从 logit 变化到 log‑policy 变化
我们关心目标状态 \(x_o\) 下的 \(\log\pi^t(y\!\mid x_o)\)。令
\[f(z)=\log\bigl[\text{Softmax}(z)\bigr]_y,\]则
\[\log\pi^{t+1}(y\mid x_o) =f\bigl(z^{t+1}(x_o)\bigr),\]对 \(f\) 也做一阶泰勒展开:
\[f\bigl(z^{t+1}(x_o)\bigr) \approx f\bigl(z^t(x_o)\bigr) +\bigl[\nabla_z f\bigl(z^t(x_o)\bigr)\bigr]^\top \bigl(z^{t+1}(x_o)-z^t(x_o)\bigr) +O\bigl(\|z^{t+1}(x_o)-z^t(x_o)\|^2\bigr).\]注意
\[\nabla_z f(z)\Big|_{z^t(x_o)} =\nabla_z\log\pi^t(y\mid x_o) \equiv A^t(x_o) \;=\;I \;-\;\mathbf{1}\,\pi^t(\cdot\mid x_o)^\top\](这是 softmax log‑梯度的标准形式)。于是
\(\Delta\log\pi^t(y\mid x_o) =\log\pi^{t+1}(y\mid x_o) -\log\pi^t(y\mid x_o)\)\(\quad\approx A^t(x_o)^\top \Bigl[\,-\eta\,\mathcal{K}^t(x_o,x_u)\,G^t_u\Bigr] \;+\;O\bigl(\eta^2\,\|\nabla_\theta h_\theta(x_u)\|_{\mathrm{op}}^2\bigr).\)
去掉“\(\top\)”的位置符号并整理标量积,就得到了命题中式(3):
\[\boxed{ \Delta\log\pi^t(y\mid x_o) =-\eta\,A^t(x_o)\,K^t(x_o,x_u)\,G^t(x_u,y_u) \;+\;O\bigl(\eta^2\|\nabla_\theta z(x_u)\|_{\mathrm{op}}^2\bigr). }\]小结:
- 用参数梯度下降的一阶泰勒展开,把 \(\theta\) 更新诱导到 logit \(z\) 上;
- 再对 log‑softmax 作一阶泰勒展开,得到 log‑policy 的变化;
- 识别出雅可比积 \(\nabla_\theta h\;\nabla_\theta h^\top\) 是 NTK,\(\nabla_z\log\pi\) 给出 \(A^t\),最后组合即可。

本文使用署名协议进行授权.